



QGroundControl
Opis QGroundControl
QGroundControl zapewnia pełną kontrolę lotu i konfigurację dla pojazdów napędzanych ArduPilot lub PX4 Pro. Celem QGroundControl jest poprawa łatwości obsługi dla nowych użytkowników oraz zaawansowana obsługa funkcji dla doświadczonych użytkowników.
Funkcje QGroundControl:
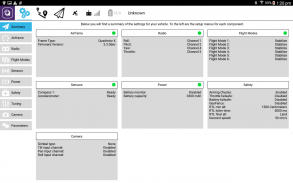
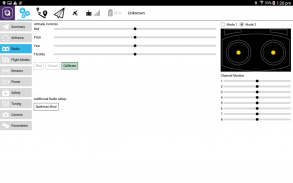
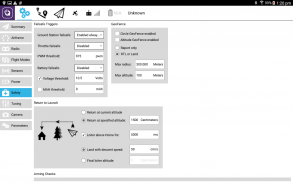
- Pełna obsługa konfiguracji dla pojazdów z oprogramowaniem układowym PX4 Pro i ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
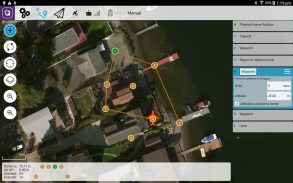
- Planowanie misji dla lotów autonomicznych
- Wyświetlanie mapy lotu, pokazującej pozycję pojazdu, tor lotu, punkty trasy i instrumenty pojazdu
- Strumieniowe przesyłanie wideo z nakładkami wyświetlacza instrumentu
- Wsparcie lotu dla każdego pojazdu obsługującego MAVLink
QGroundControl jest również dostępny dla systemów Windows, MacOS, Linux i iOS.
Informacje o wersji
Oficjalna strona QGroundControl
Dokumentacja
Wsparcie
QGroundControl - Wersja 4.1.1
(29-01-2021)QGroundControl - Informacje APK
Wersja APK: 4.1.1Pakiet: org.mavlink.qgroundcontrolNajnowsza wersja QGroundControl
Inne wersje












 4.63
4.63
Apki w tej samej kategorii

Mogą Cię się spodobać...







